
Robotics, Intelligent Systems, and Control Lab prepares robots to have swarm intelligence
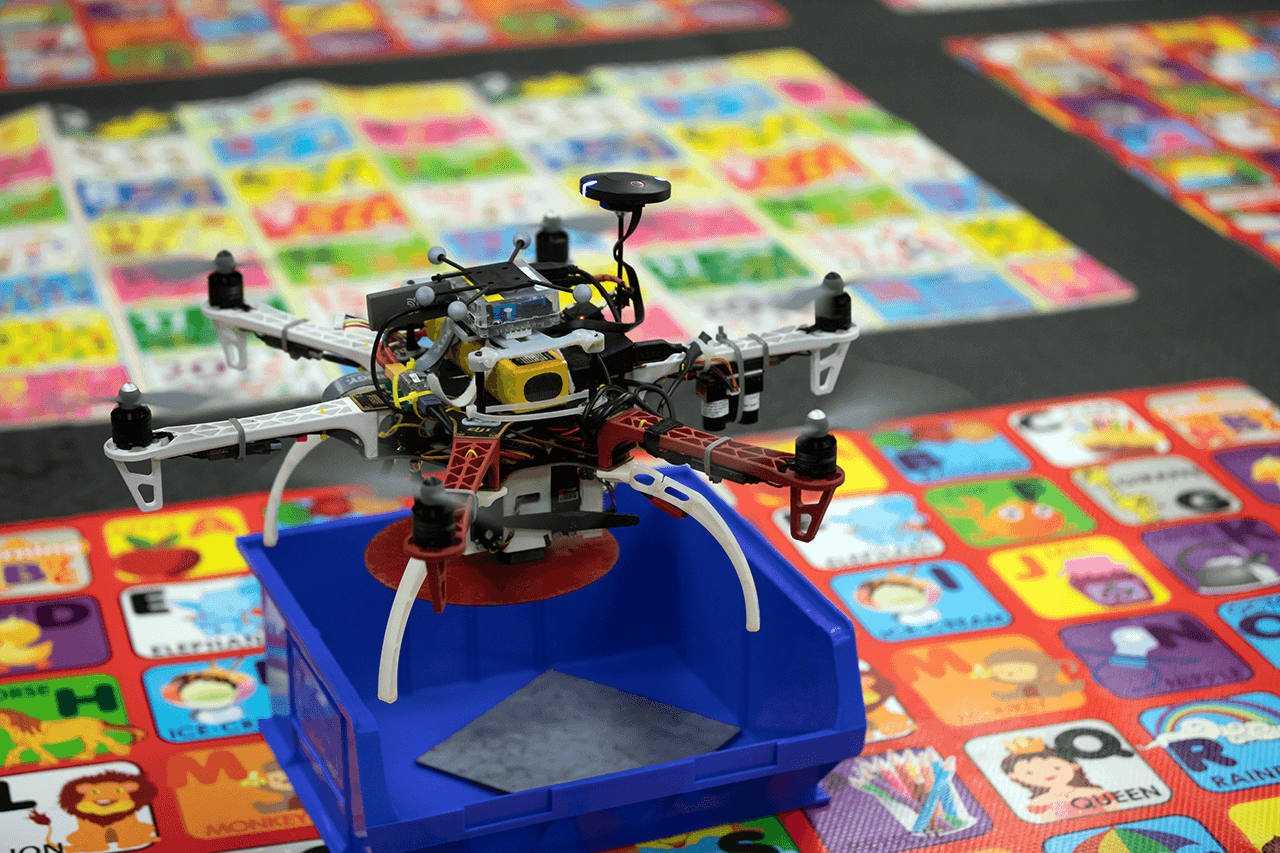
The University's Robotics, Intelligent Systems, and Control lab team works on swarm robotics, developing ways for robots to work together on collaborative tasks. Photo by Sarah Munshi.
By Lulwah Shalhoub, KAUST News
The KAUST Robotics, Intelligent Systems, and Control (RISC) lab takes a "think globally, act locally" approach in swarm robotics. The RISC lab develops methodologies to deploy robots to work together to achieve collaborative tasks in missions involving crucial time-sensitive tasks, such as team search and rescue, patrolling for safety and environmental monitoring.
To address these applications, the RISC lab develops algorithms to enable robots to operate with limited or even no human supervision.
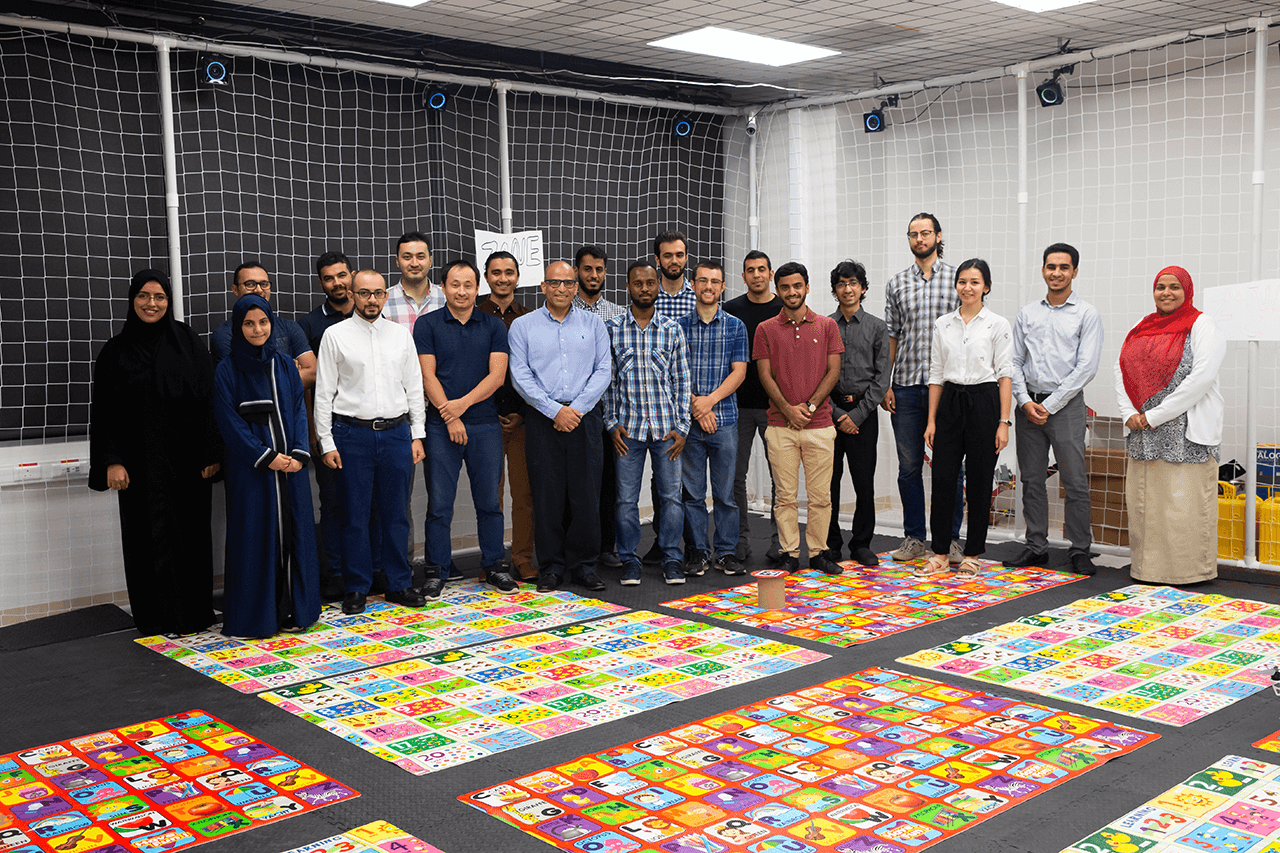
KAUST Professor Jeff Shamma is pictured here on campus with members of his Robotics, Intelligent Systems, and Control lab team. Photo by Sarah Munshi.
"We want to move away from the low-level remotely operated model to more of a high-level human supervised model. Instead of a robot being an extension of the operator, it can be a partner that is trying to collaborate with the human operator," said Jeff Shamma, principal investigator at RISC and KAUST professor of electrical engineering.
A sought-after scenario would be an emergency event in which the robot is sent out to explore the environment, figure out where the attention needs to be and help evacuate or give aid to an individual. Beyond building onboard intelligence, the RISC lab is stepping up the game through the use of game theory.
"Game theory is the study of interconnected intelligent decision makers. While it has been used traditionally as a modeling formalism in social sciences, our lab has been investigating its role for engineered systems," Shamma explained.

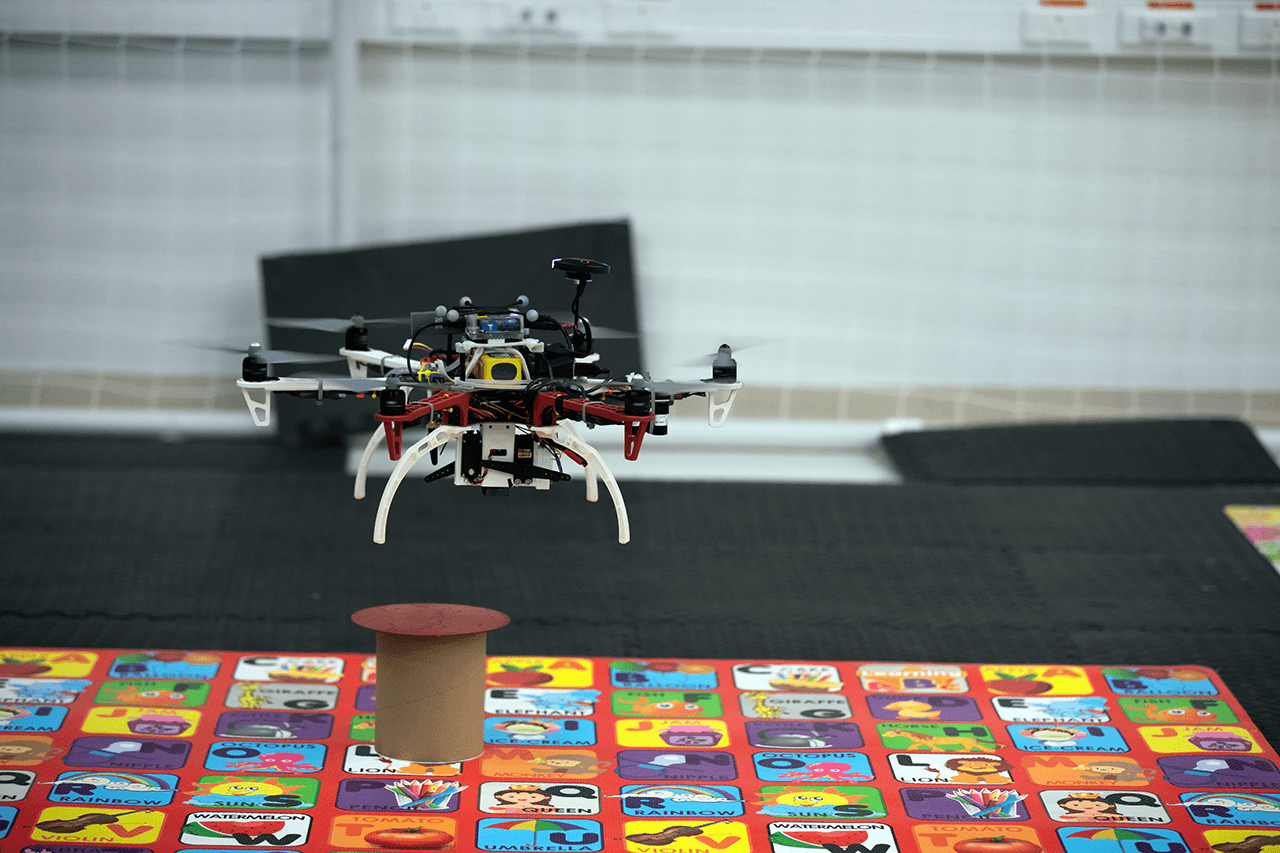
A drone takes flight in KAUST Professor Jeff Shamma's Robotics, Intelligent Systems, and Control lab as part of his research group's work. Photo by Sarah Munshi.
In game theory, the consequences of one actor's decision depend on the decisions of others. When working in a team, each team member must decide what to do, and the quality of this decision depends on what other team members are doing.
An example Shamma gave is engaging an intruder with autonomous drones. To work effectively as a team, some drones should pursue the intruder whereas others should distribute themselves to block off an escape route. Each drone needs to decide where to go based on both an anticipation of what the intruder will do and how the other team members will react. Another scenario Shamma gave was a group of autonomous vehicles tracking an oil spill, where a good vantage point for one vehicle depends on the locations of other vehicles.
Some of KAUST Professor Jeff Shamma's research group's work involves developing drones to operate with limited or even no human supervision. Photo by Sarah Munshi
Another research direction in swarm intelligence examined by the RISC lab is programmable self-assembly. Here, small modules can attach and detach themselves to each other based on a handcrafted set of rules. As modules bump into each other in a seemingly random fashion, they actually can self-assemble into almost any desired structure. The RISC lab is developing both algorithms for programmable self-assembly and hardware modules for testing and validation.
When acting as a swarm, individual robots can use message passing to other nearby robots to help coordinate their decisions. As individuals, they must decide what messages to send to others and how to react to messages received. To be effective as a swarm, "it is about thinking globally and acting locally," Shamma said.
Related stories: